ROSY LS mit scanCONTROL von Micro-Epsilon
Juni 2022
Versuche zur Integration und Vermessung am Stäubli CS8 TX 60L.
Zielsetzung

ROSY LS mit scanCONTROL von Micro-Epsilon
Juni 2022
Versuche zur Integration und Vermessung am Stäubli CS8 TX 60L.
Zielsetzung
ROSY LS
ROSY - Robot Optimization System
Basierend auf Kundenanforderungen und eigenen Erfahrungen sowie eigenen Bedürfnissen, hat teconsult das bewährte Mess- und Kalibriersystem ROSY neu entwickelt.
Unsere ROSY ist ein hochpräzises Messsystem für den Einsatz in der Robotik. Neben der Masterung von Robotern und der Werkstück- und Werkzeugvermessung ist auch das Einmessen externer Achsen möglich. Hauptbestandteile der ROSY sind ein Sensor, ein modulares Befestigungssystem und ein entsprechendes Softwarepaket. Die Auswahl der Hard- und Softwarekomponenten ergibt sich aus den Anforderungen Ihrer Anwendung.
Die Messungen werden prozessnah in der Arbeitszelle durchgeführt. ROSY kann flexibel in der Zelle oder am Roboter montiert werden.
Überschreiten nach einer Genauigkeitsprüfung des Robotersystems die ermittelten Abweichungen von den Prozessanforderungen oder sind die Anforderungen an die Genauigkeit des Roboters sehr hoch, kann die Roboterkalibrierung/Masterung eingesetzt werden.
ROSY ermöglicht die Erhöhung und Überprüfung der Genauigkeit von Industrierobotern.
ROSY ist ein Servicetool in einem tragbaren Koffer. ROSY wird ebenso als Inlinetool eingesetzt werden.
Eigenschaften
Schnittstellen
Software
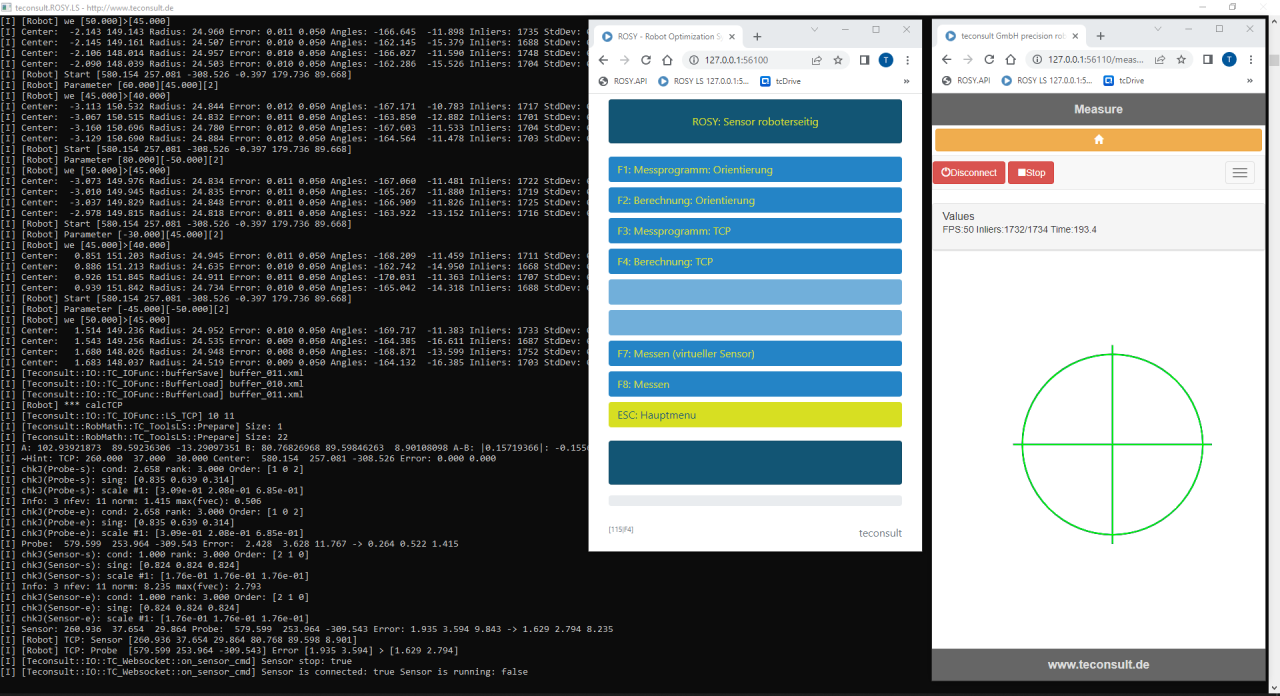
Webinterface und Konsolefenster mit Logmeldungen
Alleinstellungsmerkmale ROSY LS
Setup
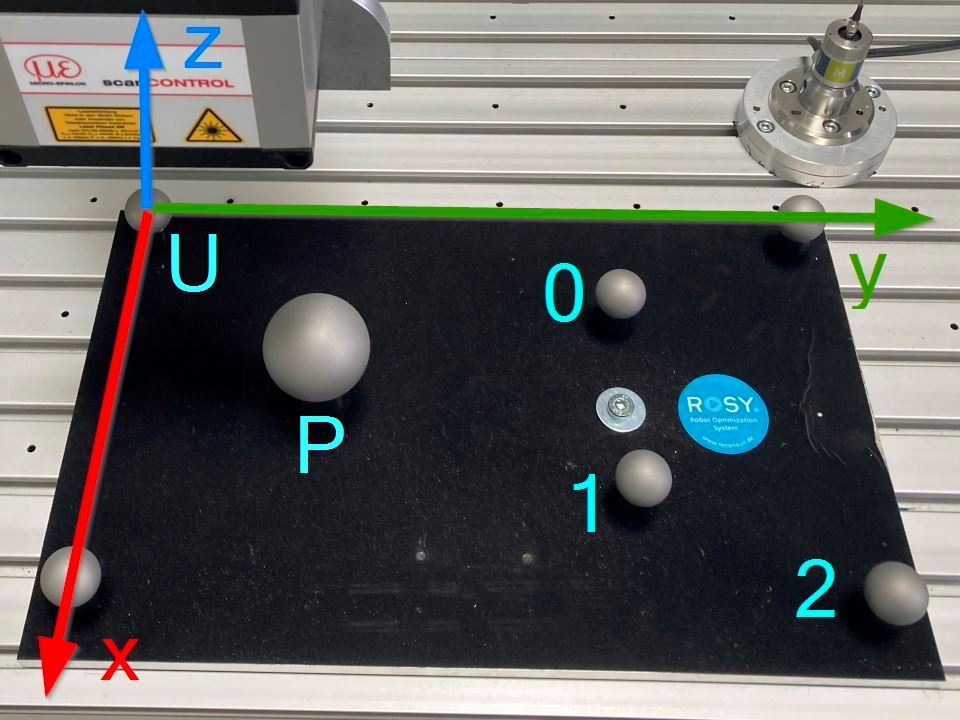
Versuchsaufbau
Sensor
Der Sensor ist am Roboter angebracht.

Probe
Als Probe wird eine Kugel mit höchster Präzision eingesetzt. Diese wird raumfest montiert.

Vorrichtung / Frame
Die Messkugel P (Probe) dient zur Ermittlung der Sensororientierung und Sensorposition.
Das Koordinatensystem (Frame) wird über die Kugel x und y aufgespannt. Der Ursprung befindet sich in der Kugel U.
Die Positionen der Referenzkugeln 0, 1, 2 werden im Frame definiert.
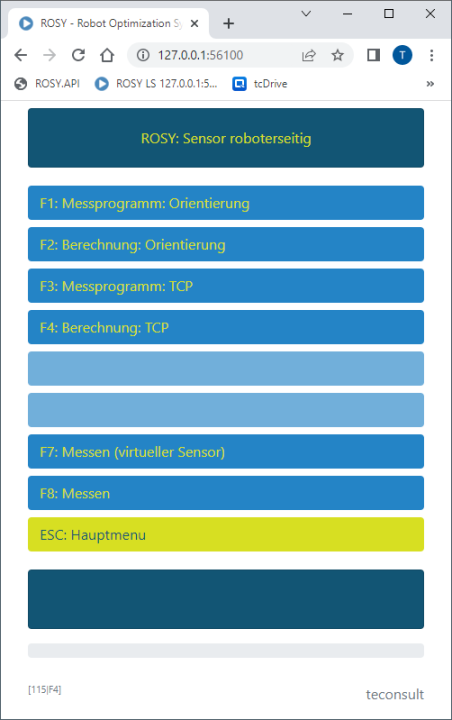
Webgui
Optionales Webinterface
Über das Webgui kann die Robotersoftware bedient werden. Eine Integration für den Automaticbetrieb ohne Menü ist möglich.
Hauptmenü
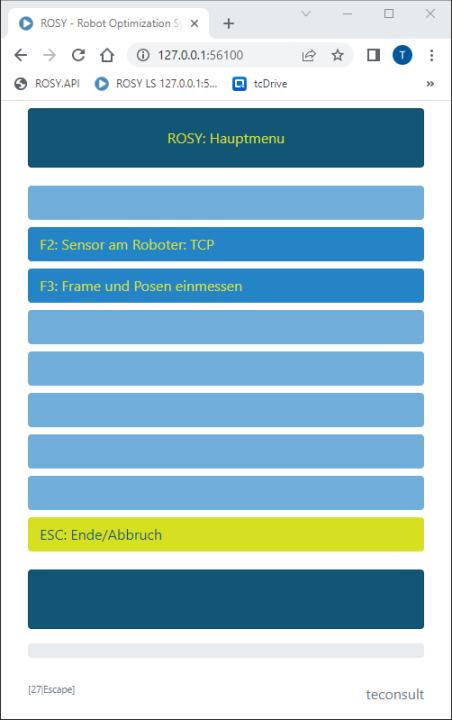
Menü: Ermittlung Sensor-TCP
Menü: Ermittlung Frame
Menü: Fadenkreuz zur Teachhilfe
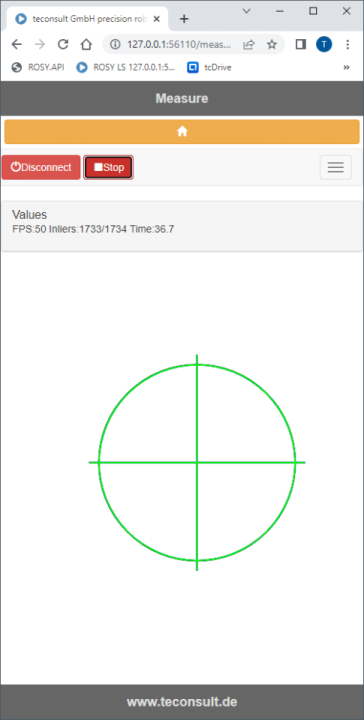
Vermessung des Sensor-TCPs
Ermittlung der Sensorposition und Sensororientierung bezüglich des Roboterflansches.
Vorgehensweise
Ergebnis
Als Ergebnis wird die Position und Orientierung des Sensors bezüglich des Roboterflanschses dargestellt (TCP: Sensor). Die Beschreibung erfolgt in der Euler-Konvention der jeweiligen Robotersteuerung.
Es wird ebenfalls die Position der raumfesten Probe ermittelt (TCP: Probe).
Der Fehler (Error) beschreibt den mittleren und maximalen Fehler der Rückprojektion vor und nach der Berechnung. Dieser Fehler liegt deutlich außerhalb des erwarteten Bereichs (<0.500mm) und spiegelt die derzeitige Genauigkeit des Roboters wieder. Offensichtlich ist der Roboter starkt verstellt und zumindest die Nulllagen sollten neu eingestellt werden.

Video Sensor-TCP
Vermessung der Vorrichtung (Framevermessung)
Ermittlung des Bezugssystem bezüglich der Roboterbasis.
Vorgehensweise
Ergebnis
Als Ergebnis wird die Position und Orientierung des Frames bezüglich der Roboterbasis ermittelt. Die Beschreibung erfolgt in der Euler-Konvention der jeweiligen Robotersteuerung.
Video Framevermessung
Teachen der Referenzposen
Automatisches einmessen bezüglich Frame der Vorrichtung.
Vorgehensweise
Ergebnis
Als Ergebnis wird die Position uns der jeweiligen Referenzkugel im Frame der Vorrichtung ermittelt.
Video Teachen
Verschieben der Vorrichtung
Die Vorrichtung wurde verdreht und verschoben.
Ergebnis mit der unvermessenen Vorrichtung
Die Referenzposen 0, 1 und 2 wurden neu Vermessen und mit den alten Positionen verglichen. Die maximale Abweichung ist über 35mm.

Video Framevermessung nach Verschiebung
Test nach dem erneuten Einmessen der Vorrichtung
Ergebnis nach dem erneuten Einmessen des Frames
Als Ergebnis wird die Position uns der jeweiligen Referenzkugel im Frame der Vorrichtungermittelt.

Video Testen der Referenzkugel nach dem erneuten Einmessen des Frames